简介
删除集合中的元素,有两种删除的形式,一种是删除特定元素,一种是删除特定索引的元素。
删除的方式有:使用Java API (java 8)、从后往前的循环、使用迭代器、使用新的集合。
本主要总结个人作为App开发负责人时的一些经验,主要描述App的架构设计、开发管理以及相关事项等。
我们接到需求后,准备开发一个新项目时,作为开发负责人该如何去做?主流程如下:
介绍实际车机开发中会用到的基础知识和概念,持续更新。
| 简写 | 全称 | 描述 |
|---|---|---|
| BAT | Battery | 蓄电池,BAT+一般表示电池有电状态 |
| ACC | Accessory | 附件档,ACC-ON时可为部分车载附属设备供电,空调等除外。 |
| IGN | Ignition | 点火档,IGN-ON时,可为所有设备供电,包括空调 |
| IVI | In-Vehicle Infotainment | 车载娱乐信息系统,车机SoC是其中的核心部分 |
| HVAC | Heating, Ventilation and Air Conditioning | 供热通风与空气调节,即空调 |
| DVR | Drive Video Recorder | 行车记录仪 |
| HUD | Head-Up Display | 抬头显示,在驾驶位正前方,一般与前车窗重合 |
| M-CAN | Multimedia CAN | 多媒体CAN协议 |
| V-CAN | Vehicle CAN | 车身CAN协议 |
| RVC / RVM | Rear View Camera / Monitor | 后方车辆摄像头或监控,一般称为倒车影像,包括实时路况显示和雷达信息显示(距离) |
| AVM | Around View Monitor | 360度全景影像系统 |
本文档主要介绍利用某导航SDK开发AR导航的流程(获取并传递图片)和注意事项,基础导航、图像的检测、AR融合算法皆由SDK提供。
车载AR导航机制一般为:首先利用摄像头将前方道路的真实场景实时捕捉下来,再结合汽车当前定位及传感器(陀螺仪、惯导)数据、地图导航信息以及场景AI识别,进行融合计算,然后生成虚拟的导航指引模型,并叠加到真实道路上,从而创建出更贴近驾驶者真实视野的导航画面。
车载AR导航系统需要实现的能力:
其他具体要求看SDK提供方的文档。
之前做了基于某流行的导航SDK开发车机导航App的项目,现在做一个总结,仅仅总结与特定导航无关的基础知识和概念。
车载导航系统由硬件和软件组合而成,按功能可划分为由定位系统、系统软件、导航应用软件等。定位系统包括GNSS天线、各种传感器、滤波器、DR模块等;系统软件目前较流行的是Android系统;导航应用软件即常说的某某导航App,正式名称为导航电子地图,可通过触摸显示屏或者语音等进行交互操作, 实现实时定位、 目的地检索、路线规划、画面和语音引导等功能,帮助驾驶者准确、快捷地到达目的地。
车载导航与手机导航的最大的优势是,一,提供更加精准的定位,尤其是在GPS信号不好的时候,对比更加明显;二,更大的显示屏、更好的散热、更好的稳定性等。
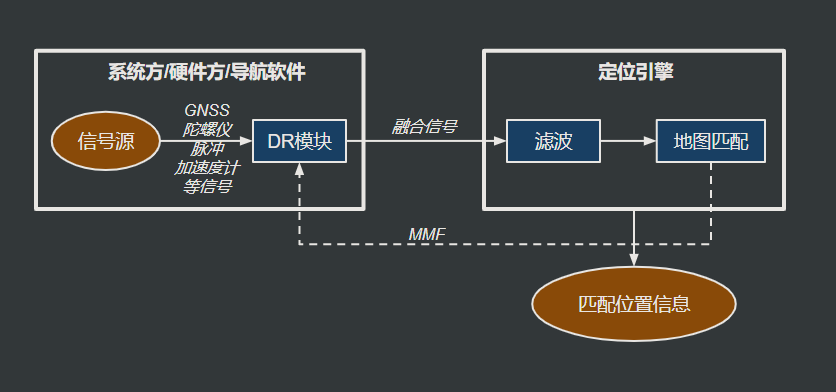
在信号弱或者高速行驶时,仅依靠卫星定位是困难的,目前的定位不只是卫星定位,也会有硬件或软件的参与。硬件一般包括:GNSS信号接收机或称天线、DR微处理器(也可能由软件处理)、车速传感器、陀螺仪、加速度计等。 目前定位一般是通过包括GNSS信号在内的许多信号一起通过航位推算算法(DR)计算得到的,下图是DR模块位于硬件或软件系统中时的信号流程图,MMF表示地图匹配反馈信号。
目前普通民用 gps 和 dr 组合定位设备 (gps 惯性设备 ) 已经可以达到 1 000 m 无 gps 信号的情况下的航向精度和 10 m 的距离精度。
车载天线接收GNSS信号的频率是有规定的,比如10Hz,频率太高对系统要求也会高,必定提高成本。10Hz的情况下,如果车速为36km/h(10m/s),间隔1m接收一次定位信号,似乎可以接收,如果车速为33m/s(120km/h),则间隔3.3m才接收一次定位,对于一些路口区域,很容易错过。
航位推算:这种根据已知信息(当前位置、速度、加速度、方向等)推算经过一段时间后的位置的方法称为DR,dead reckoning。
卫星定位系统:一般称为全球导航卫星系统( Global Navigation Satellite System,GNSS),GPS是美国的全球定位系统的简称,一般应该使用GNSS代表卫星定位或导航系统的总称。
陀螺仪:一般指三轴陀螺仪,是用于获取车辆三个轴向的角速度值,如果是单轴陀螺仪,则一般指Z轴,用来测量车辆的左右转向角度值。
扩展:YUV_420_888 介绍
首先YUV是一种颜色空间,基于YUV的颜色编码是流媒体的常用编码方式。“Y”表示明亮度(Luminance、Luma),“U”和“V”则是色度、浓度(Chrominance、Chroma)。
YUV420是一类格式的集合,YUV420并不能完全确定颜色数据的存储顺序。举例来说,对于4x4的图片,在YUV420下,任何格式都有16个Y值,4个U值和4个V值,不同格式只是Y、U和V的排列顺序变化。
I420(YUV420Planar的一种)则为YYYYYYYYYYYYYYYYUUUUVVVV,NV21(YUV420SemiPlanar)则为YYYYYYYYYYYYYYYYUVUVUVUV。
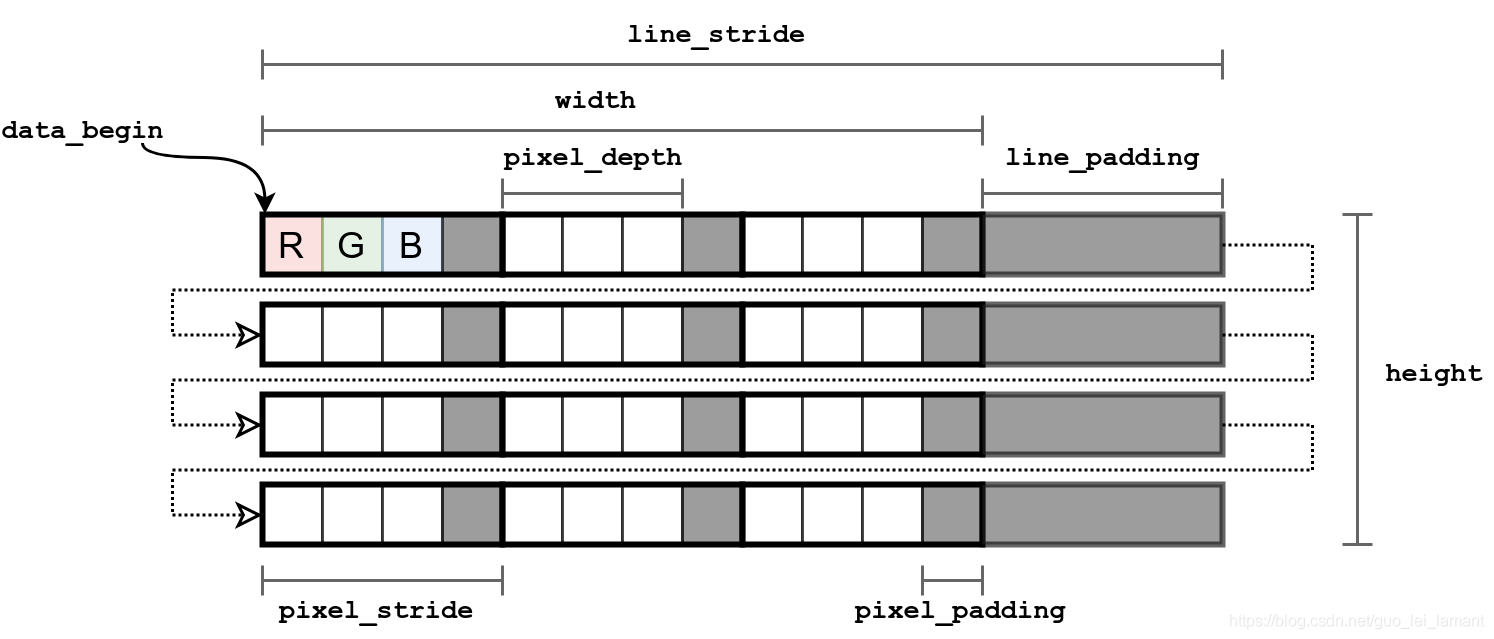
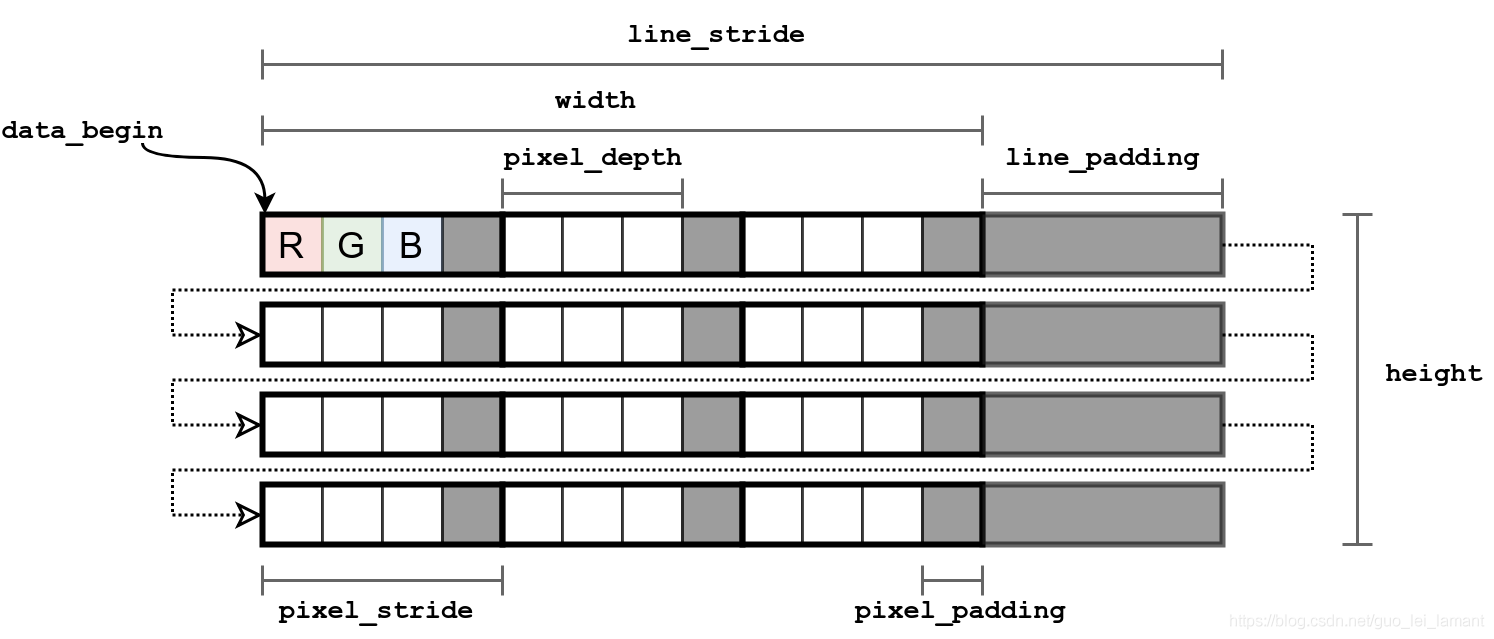
在Camera2中,YUV_420_888通常为YUV420Planar排列(手机不同可能会存在差异,目前我用过的几个手机都是这个格式)。实际应用中,可以根据采集到的数据中的pixelStride值判断具体的格式,再去做数据转换,其中pixelStride代表行内颜色值间隔。
说明:
之前参与了Launcher项目,负责样式的自定义布局部分。这部分主要涉及到的技术点是自定义布局和动画,难度适中,但略繁杂,其中有几个技术相关的难点记录如下。
布局基于二维格子:将图标显示区划分为m x n个格子,每个图标占据一个或多个格子。自由布局样式里,格子划分得更小,每个图标的最小尺寸有规定,不能小于规定值。
图标大小可更改:不同尺寸的图标展示的信息不一样,最小的图标仅展示一个ICON,最大的图标可以展示应用丰富的信息以及操作。展示的信息是通过与应用提供的服务组件或广播来通信的。
下图边框表示一个ViewGroup,包含8个子View。我们希望长按某个子View,并拖动它到其他的位置,比如长按View-1后,显示能够拖动,然后拖动它到View-7的位置。

Github上应该有相关框架,可以自己实现但不需要,因为Android提供了相关API,见官方文档。其原理是创建待拖动View的副本,并跟随手指触摸坐标更改副本View的位置。使用流程为在View的长按监听回调OnLongClickListener.onLongClick(View v)里调用开启拖动的方法View.startDragAndDrop(),然后在目标容器中注册拖动回调监听即可触发拖动事件的回调方法OnDragListener.onDragEvent(),之后根据坐标判断拖动结束的地方或View。
基本概念:所谓贪心算法是指,在对问题求解时,总是做出在当前看来是最好的选择。也就是说,不从整体最优上加以考虑,他所做出的仅是在某种意义上的局部最优解。
贪心算法没有固定的算法框架,算法设计的关键是贪心策略的选择。必须注意的是,贪心算法不是对所有问题都能得到整体最优解,选择的贪心策略必须具备无后效性,即某个状态以后的过程不会影响以前的状态,只与当前状态有关。
所以对所采用的贪心策略一定要仔细分析其是否满足无后效性。
贪心策略适用的前提是:局部最优策略能导致产生全局最优解。
实际上,贪心算法适用的情况很少。一般,对一个问题分析是否适用于贪心算法,可以先选择该问题下的几个实际数据进行分析,就可做出判断。
贪心算法的基本思路
贪心算法的实现框架
1 | // 从问题的某一初始解出发; |
双指针用法的一种,这个算法技巧的思路非常简单,就是维护一个窗口,不断滑动,然后更新答案。
代码结构:
1 | int left = 0, right = 0; |
给你一个字符串 s 、一个字符串 t 。返回 s 中涵盖 t 所有字符的最小子串。如果 s 中不存在涵盖 t 所有字符的子串,则返回空字符串 “” 。
1 | public String minWindow(String s, String t) { |